Introduction
In the realm of DIY electronics and robotics, Arduino stands out as a beacon of accessibility and versatility. Among its myriad applications, one particularly intriguing project is the creation of an ultrasonic sensor-based radar system. This project not only encapsulates the essence of interfacing hardware and software but also serves as an excellent educational tool for understanding basic principles of sonar and radar systems.
However, what do you do when you’re eager to develop the software component but are still waiting on the hardware? This is where simulation and emulation come into play. In this article, we delve into the fascinating journey of building an Arduino-based radar system, emphasizing the role of a TCP/IP socket-based emulator in simulating real-world scenarios for testing the user interface (UI) while awaiting the arrival of the actual Arduino components.
The Core Concept: Arduino Radar System
The heart of our project is an Arduino board equipped with a servo motor and an ultrasonic sensor. The servo motor allows the sensor to sweep across an area, much like a radar, while the ultrasonic sensor measures distances by emitting sound waves and measuring the time it takes for the echo to return. This setup mimics a basic radar system, detecting objects within its range and providing data on their location and distance.
The Hardware Setup
- Arduino Board: Acts as the brain of the operation, controlling the servo and processing sensor data.
- Servo Motor: Enables the ultrasonic sensor to rotate and scan the area.
- Ultrasonic Sensor: Measures the distance to objects by emitting ultrasonic waves.
The Software Component
The software aspect involves processing the data from the ultrasonic sensor and visually representing it on a computer screen. This is where we encounter a unique challenge: developing and testing the software interface without the physical hardware.
Emulating the Hardware: The Role of TCP/IP Sockets
To overcome the absence of physical hardware, we employ a TCP/IP socket-based emulator. This emulator mimics the data one would expect from the actual Arduino setup, allowing us to develop and test the UI in a controlled environment.
Why TCP/IP Sockets?
TCP/IP sockets offer a reliable way to establish a connection between two points (in our case, two computers) for data transmission. This method is versatile and can work over local networks or the internet, making it an ideal solution for our emulation needs.
The Emulator Setup
- Server Side (Emulating Arduino): A program running on one computer simulates the Arduino’s output. It sends data resembling what the ultrasonic sensor would produce, including angle and distance measurements.
- Client Side (UI Interface): Another program, which will eventually interface with the actual Arduino, receives this data and processes it, just as it would in a real-world scenario.
Developing the UI: Challenges and Solutions
The UI is crucial as it translates raw data into a comprehensible visual format. We chose to develop it in C#, leveraging the robust graphical capabilities of Windows Presentation Foundation (WPF) for a rich and interactive display.
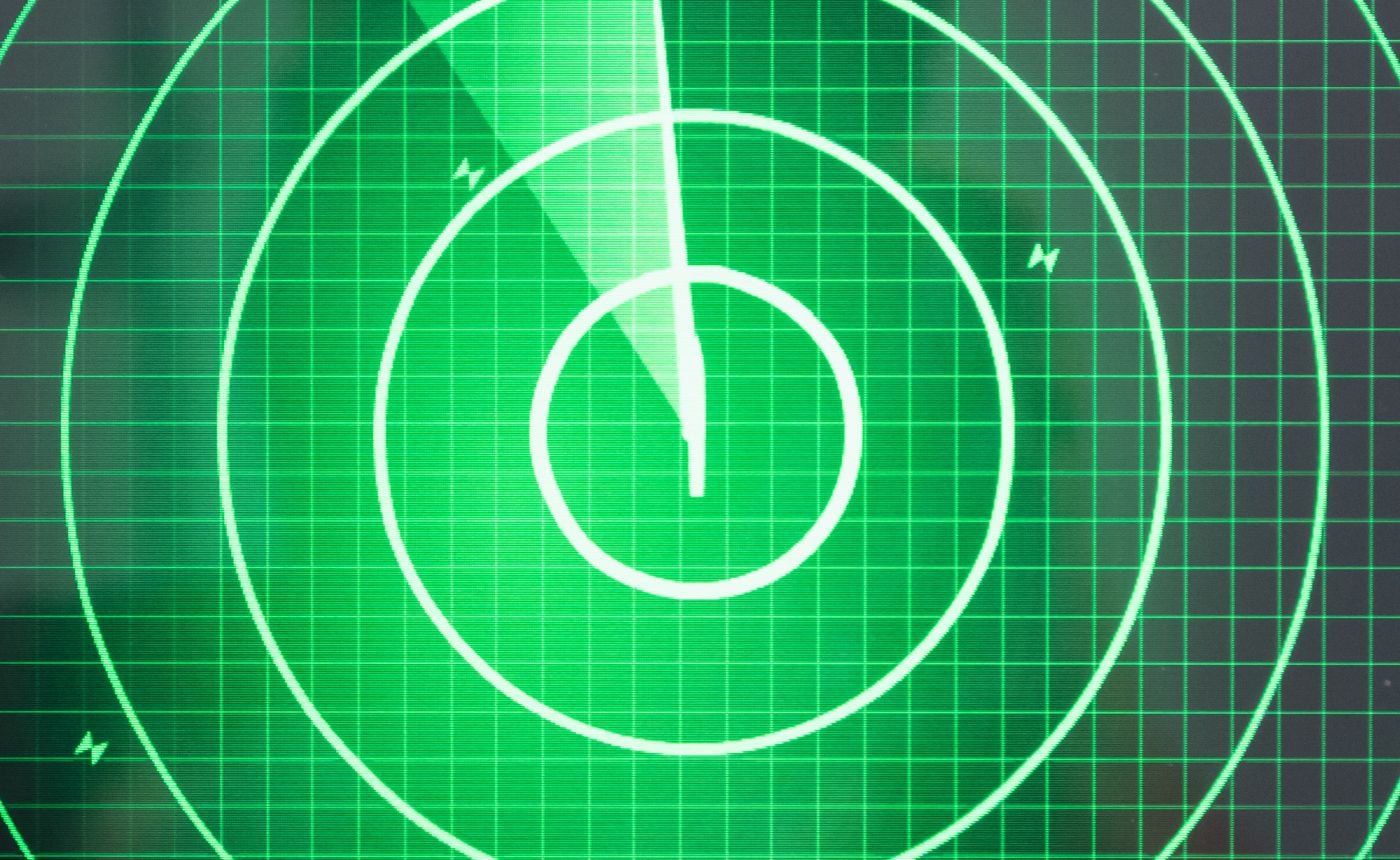
The Radar Display
The radar display is a graphical representation of the data received from the ultrasonic sensor. It shows objects detected in the vicinity, updating in real-time as the servo motor sweeps.
Handling Data
The UI software interprets the data received via TCP/IP sockets, converting it into graphical elements on the radar display. This process involves challenges like real-time data handling and efficient rendering of the radar sweep.
Testing and Refinement
With the emulator in place, we can rigorously test and refine the UI. This phase is crucial for ensuring that once the actual hardware is connected, the software will perform as expected.
Real-World Application
Once the hardware is assembled, the software can seamlessly transition from receiving data from the emulator to the actual Arduino setup. This flexibility is one of the key strengths of using TCP/IP sockets for emulation.
Conclusion
The journey of building an Arduino-based radar system, complemented by a TCP/IP socket-based emulator, is a testament to the power of innovation and problem-solving in the field of DIY electronics and software development. This project not only provides a practical understanding of radar systems but also highlights the importance of emulation in software development, especially when hardware availability is a constraint.
As we await the arrival of our Arduino components, our emulator continues to play a pivotal role, ensuring that once the physical setup is complete, our software will be ready to bring the radar system to life, opening doors to a world of possibilities in the realm of robotics and sensor technology.